Comparing Deep CNNs and Vision Transformers for Crack Segmentation
Authors
- Ansh Kapoor
📊 Dataset
The dataset used in our experiments is DeepCrack:
- Size: 537 RGB images (384×544 px)
- Split: 300 training, 237 testing
- Imbalance: ~3.5% crack pixels, max ~20% in some images
- Application: Pavement/road crack detection and segmentation
Citation: Zou et al., DeepCrack: Learning hierarchical convolutional features for crack detection, Neurocomputing, 2019. DOI
🧠 Model(s)
We implemented and compared the following models:
- CNN Baselines: ResNet50-UNet, VGG19-UNet
- Transformers: SegFormer (B0), Swin Transformer (Small), Mask2Former (Swin-Small), UNetFormer (modified)
Each model was fine-tuned for binary crack segmentation. Loss function: Weighted BCE + Dice.
📈 Results
Average performance metrics on the DeepCrack test set:
| Model | IoU | Dice | Precision | Recall | Accuracy |
|---|---|---|---|---|---|
| ResNet50-UNet | 0.513 | 0.624 | 0.557 | 0.750 | 0.968 |
| VGG19-UNet | 0.465 | 0.587 | 0.506 | 0.749 | 0.961 |
| SegFormer (B0) | 0.596 | 0.682 | 0.694 | 0.698 | 0.976 |
| Swin Transformer | 0.554 | 0.653 | 0.610 | 0.740 | 0.970 |
| Mask2Former | 0.520 | 0.625 | 0.550 | 0.773 | 0.965 |
| UNetFormer | 0.667 | 0.789 | 0.717 | 0.922 | 0.982 |
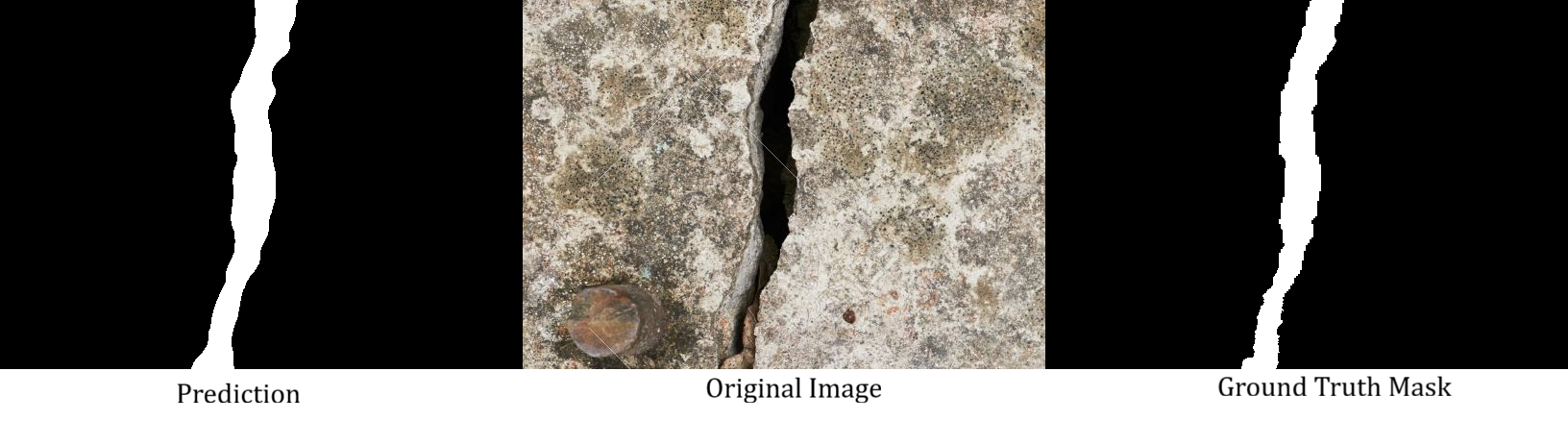
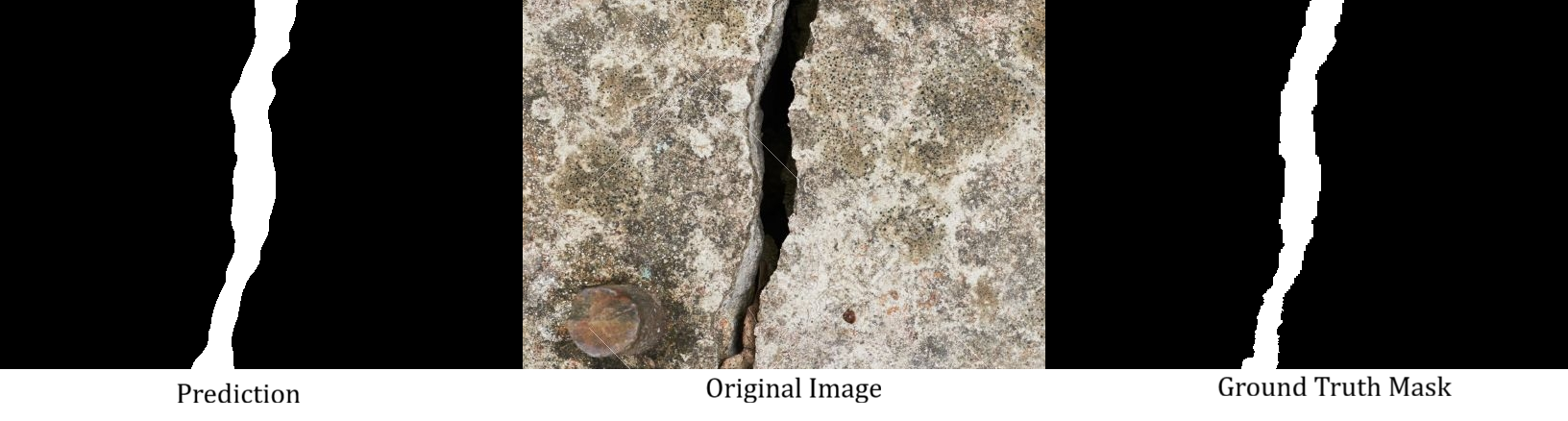
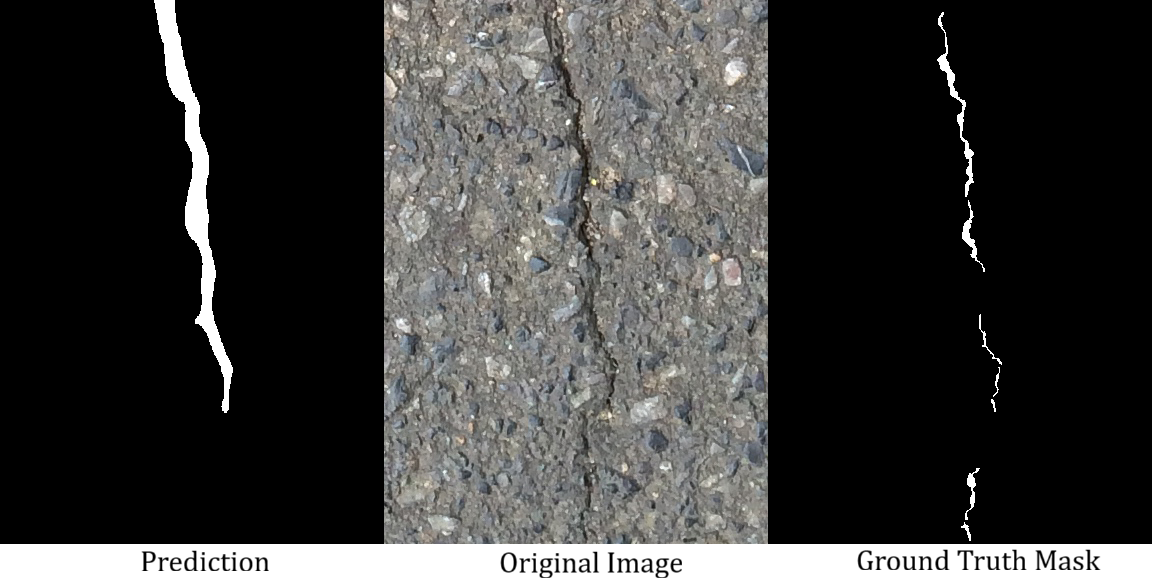
Qualitative examples (best/worst cases):
📌 Notes
- Transformer-based models consistently outperformed CNN baselines.
- UNetFormer achieved the best overall results (highest IoU, Dice, Recall).
- SegFormer delivered the cleanest predictions (best Precision).
- Weighted BCE + Dice ensured high recall (fewer missed cracks), but slightly increased false positives.
- Some of the zip files containing prediction were not pushed due to github size constraints